碎碎念
呜呜,孩子不会dev,随便打着玩的。
🧐Dev is so fun… functional!
题目描述
写出和以下scheme代码等价的代码(三种语言)
#lang scheme
(define (make-withdraw balance)
(lambda (amount)
(if (>= balance amount)
(begin (set! balance (- balance amount))
balance)
"Insufficient funds")))
(define W1 (make-withdraw 100))
(define W2 (make-withdraw 100))
(W1 50)
; 50
(W1 30)
; 20
(W2 70)
; 30
(W2 50)
; Insufficient funds要点
哈哈,不会函数式编程捏。
题目要求的是闭包实现,因此用class实现类似功能是不行的。
过程
Javascript根本不会,但用法都能从网上找到
C++
#include <functional>
#include <iostream>
std::function<void(int)> make_withdraw(int balance){
return [=] (int amount) mutable {
if (balance >= amount){
balance -=amount;
std::cout<<balance<<'\n';
} else {
std::cout<<"Insufficient funds\n";
}
};
}
int main(){
auto W1=make_withdraw(100);
auto W2=make_withdraw(100);
W1(50);
W1(30);
W2(70);
W2(50);
}Python
def make_withdraw(balance):
def kkndlam(amount):
nonlocal balance
if balance >= amount:
balance -= amount
print(balance)
else:
print("Insufficient funds")
return kkndlam
W1 = make_withdraw(100)
W2 = make_withdraw(100)
W1(50)
W1(30)
W2(70)
W2(50)Javascript
function make_withdraw(balance) {
function kkndlam(amount) {
if(balance>=amount){
balance -= amount;
console.log(balance)
} else{
console.log("Insufficient funds");
}
};
return kkndlam;
}
var W1 = make_withdraw(100);
var W2 = make_withdraw(100);
W1(50);
W1(30);
W2(70);
W2(50);♊双人成行
题目描述
使用数据并行化实现多机/多卡对CIFAR-10进行分类的神经网络,模型自选,并回答数据并行化的方式
要点
CPU+GPU也是双卡😤,pytorch写一下multiprocessing就行。
过程
配置
- CPU 略
- GPU NVIDIA GeForce MX450
- 机器学习环境 pytorch 2.0.1+cu117 CUDA 11.7
实现:用东拼西凑的ResNet残差网络实现的、以CIFAR-10为数据集的图像分类
Code
import os
import argparse
import torch
import torchvision
import torchvision.transforms as transforms
import torch.nn as nn
import torch.optim as optim
from torch.nn import functional as F
import torch.multiprocessing as mp
import torch.distributed as dist
from torch.nn.parallel import DistributedDataParallel
# some parameter
kernel_size=3
num_epochs = 3
lr = 0.01
# device: cpu, gpu
device = [torch.device('cpu'), torch.device('cuda')]
# transform origin data: 数据增强等。
transform = transforms.Compose([
transforms.Pad(4), # 填充像素
transforms.RandomHorizontalFlip(), # 倒转
transforms.RandomCrop(32), # 切片
transforms.ToTensor()
])
# Res block
class Residual(nn.Module):
def __init__(self, input_channels, num_channels,
kernel_size, strides=1, use1x1=False):
super().__init__()
self.conv1 = nn.Conv2d(input_channels, num_channels,
kernel_size=kernel_size, padding=(kernel_size-1)//2, stride=strides)
self.conv2 = nn.Conv2d(num_channels, num_channels,
kernel_size=kernel_size, padding=(kernel_size-1)//2)
if use1x1:
self.conv3 = nn.Conv2d(input_channels, num_channels, kernel_size=1, stride=strides)
else:
self.conv3 = None
self.bn1 = nn.BatchNorm2d(num_channels)
self.bn2 = nn.BatchNorm2d(num_channels)
def forward(self, X):
Y = self.conv1(X)
Y = self.bn1(Y)
Y = F.relu(Y)
Y = self.bn2(self.conv2(Y))
if self.conv3:
X = self.conv3(X)
Y += X
return F.relu(Y)
# 总模型
class ResNet(nn.Module):
def _resnet_block(self, input_channels, num_channels, num_residuals, first_block=False):
blist=[]
for i in range(num_residuals):
if i == 0 and not first_block:
blist.append(Residual(input_channels, num_channels,kernel_size=kernel_size, use1x1=True))
else:
blist.append(Residual(num_channels, num_channels, kernel_size=kernel_size))
return nn.Sequential(*blist)
def __init__(self, layers:list, num_classes=10):
super().__init__()
self.conv1 = nn.Conv2d(3, 16, kernel_size=kernel_size, bias=False)
self.bn1 = nn.BatchNorm2d(16)
self.relu = nn.ReLU(inplace=True)
self.resblk1 = self._resnet_block(16, 16, layers[0], first_block=True)
self.resblk2 = self._resnet_block(16,32, layers[1])
self.resblk3 = self._resnet_block(32, 64, layers[2])
self.avgPool = nn.AdaptiveAvgPool2d((1,1))
self.flatten = nn.Flatten()
self.fullconn = nn.Linear(64, num_classes)
def forward(self, x):
Y = self.conv1(x)
Y = self.bn1(Y)
Y = self.relu(Y)
Y = self.resblk1(Y)
Y = self.resblk2(Y)
Y = self.resblk3(Y)
Y = self.avgPool(Y)
Y = self.flatten(Y)
Y = self.fullconn(Y)
return Y
def train(rank, args):
# 初始化 使用内置的gloo
dist.init_process_group("gloo", rank=rank, world_size=args.nodes*args.gpus)
# 当前进程所用device
local_device = device[rank]
# print(rank, local_device)
# 初始化进程
model = ResNet([2,2,2]).to(local_device)
# 分布!
model = DistributedDataParallel(model)
#
if rank == 0: # 主进程download
train_dataset = torchvision.datasets.CIFAR10(root='data/', train=True, transform=transform, download=True)
else:
dist.barrier()
train_dataset = torchvision.datasets.CIFAR10(root='data/', train=True, transform=transform)
train_loader = torch.utils.data.DataLoader(dataset=train_dataset, batch_size=300, shuffle=True)
# 等待状态以使进程达到同步。
dist.barrier()
# 交叉熵损失函数, Adam优化器
criterion = nn.CrossEntropyLoss()
optimizer = optim.Adam(model.parameters(), lr=lr)
for epoch in range(num_epochs):
# print(epoch)
for images, labels in train_loader:
images = images.to(local_device)
labels = labels.to(local_device)
optimizer.zero_grad()
out = model(images)
loss = criterion(out, labels)
loss.backward()
optimizer.step()
dist.barrier()
# 存下参数
if rank == 0:
torch.save(model.state_dict(), "./resnet.pth")
# 关闭所有进程
dist.destroy_process_group()
if __name__ == "__main__":
os.environ["MASTER_ADDR"] = "127.0.0.1"
os.environ["MASTER_PORT"] = "11451"
parser = argparse.ArgumentParser()
parser.add_argument('-n', '--nodes', default=1, type=int)
parser.add_argument('-g', '--gpus', default=len(device), type=int)
args = parser.parse_args()
mp.spawn(train, nprocs=args.gpus, args=(args,))数据并行化
code中为多进程Ring ALLReduce方式,通过环式的通信提升了通信效率。
另外,诸如torch的dataparallel就类似于google 的 MapReduce,将任务分派给各个子任务进行reduce,最后在主节点进行整合。
🆕malloc 怎么是个函数啊
题目描述
推荐linux环境完成
使用C语言造出malloc和free的轮子,并回答相应问题。
要点
windows很好实现,但会被毙
没试过这样干,可以看看yao的博客
malloc会在分配的内存块前存放信息,从而方便free等操作。
过程
Code
#include <sys/types.h>
#include <unistd.h>
#include <stdio.h>
#define align8(x) (((((x)+7)>>3)<<3))
typedef struct block block;
typedef struct block* p_block;
// 全局
p_block begin_heap = NULL, end_heap = NULL;
struct block{
p_block next; //下一块地址。
p_block prev;// 前一块地址,用于merge。
size_t size;// 该块分配了多少字节
int free; //该块是否free.
char *ptr;// 相当于验证作用?
char data[]; //用于实际操作中按字节寻址。
};
p_block find_block(size_t size){
p_block now = begin_heap;
while(now && !(now->free && now->size >= size)){
now = now->next;
}
return now;
}
p_block extend(size_t size){
p_block now = sbrk(0);
if(sbrk(sizeof(block)+size)==(void*)-1){
return NULL;
}
now->size = size;
now->next = NULL;
now->free = 0;
if(end_heap){
end_heap->next = now;
} else {
begin_heap = now;
}
now -> prev = end_heap;
now -> ptr = now->data;
end_heap = now;
return now;
}
void *mymalloc(size_t size){
p_block now;
size_t align_size = align8(size);
if (begin_heap) {
//已有malloc内存后的操作
if (now = find_block(align_size)){
now -> free = 0;
} else {
now = extend(align_size);
if(now == NULL){
return NULL;
}
}
} else {
// 初次malloc,进行extend操作
now = extend(align_size);
if (now == NULL){
return NULL;
}
}
return now->data;
}
p_block get_block(void *nowptr){
//malloc 将信息保存在使用的内存块前,这里获取该metadata地址。
return (p_block)((char*)nowptr - sizeof(block));
}
int is_valid(void *nowptr){
if (begin_heap){
if ((void*)begin_heap < nowptr && nowptr < sbrk(0)){
return nowptr == get_block(nowptr)->ptr;
}
}
return 0;
}
p_block merge_block(p_block now){
// avoid fragments(maybe?)
if(now->next && now->next->free){
now->size += sizeof(block) + now->next->size;
now->next = now->next->next;
if(now->next){
now->next->prev = now;
}
}
return now;
}
void myfree(void * nowptr){
//merge一下碎片
if(is_valid(nowptr)){
//free block
p_block now = get_block(nowptr);
now->free = 1;
//merge prev.
if(now->prev&&now->prev->free){
now = merge_block(now->prev);
}
if(now->next == NULL){// update begin and end heap.
end_heap = now->prev;
if(end_heap){
end_heap->next = NULL;
} else {
begin_heap = NULL;
}
brk(now);
} else { //else do merge.
merge_block(now);
}
} //else : do nothing.
}
int main(){
//测测你的
printf("sizeof block: %d\n",sizeof(block));
printf("ptr begin_heap: %p, end_heap: %p\n", begin_heap, end_heap);
int *a = (int*)mymalloc(sizeof(int)*10);
printf("ptr begin_heap: %p, end_heap: %p\n", begin_heap, end_heap);
char *b = (char*)mymalloc(sizeof(char)*100);
p_block ta = get_block(a), tb = get_block(b);
printf("a: size %d, next %p, prev %p\n",ta->size, ta->next, ta->prev);
printf("b: size %d, next %p, prev %p\n",tb->size, tb->next, tb->prev);
printf("ptr begin_heap: %p, end_heap: %p\n", begin_heap, end_heap);
myfree(a);
printf("free a: ptr begin_heap: %p, end_heap: %p\n", begin_heap, end_heap);
myfree(b);
printf("free b: ptr begin_heap: %p, end_heap: %p\n", begin_heap, end_heap);
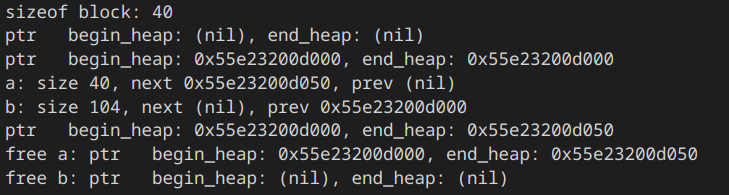
}测试截图:
为什么 malloc(size_t size) 需要申请的内存长度,但是 free(void* ptr) 不需要已申请的内存长度?
malloc的实现中,会在分配的内存块前储存一小块数据,用于存储关于该次malloc的信息,例如分配的内存字节大小,以及其他信息。free的时候只需要传入指针,程序会在约定好的位置读取信息,便可以进行free操作而不用传入需要释放的内存大小,方便操作。
OS如何管理内存?
操作系统如何管理内存捏?
- 操作系统向进程隐藏了具体的物理内存地址,取而代之的是虚拟的地址空间假象(使用MMU等硬件进行虚拟地址转换)。
- 操作系统给每一个进程分配一个页表,用相对较大的页这一单元来储存具体的代码和数据,并使用TLB、多级页表等机制进行速度优化。
- 操作系统会将不常用的页从内存储存进磁盘,当需要访问该页时,硬件抛出缺页异常,由软件(操作系统)来调度页。
需要说明的是,以上的操作系统过程都是透明的,进程无从感知这一切,操作系统用复杂的机制向进程隐藏了这一切。
🔀Trace it!
再造次轮子!
题目描述
自选语言,实现linux下的traceroute。打印出本机到目的主机之间设备的 IP 地址和 TTL 时间。由于有些中间设备关闭了某些网络服务,所以不能被 trace 到,你只需要给出相应提示即可。
要点
虽说traceroute使用的ICMP包已经确定好了类型和代码,但错误的类型和代码仍能得到回应
和出题人battle后发现出题人写错了类型和代码照样能得到回应
于是只要构造ICMP包就行了。
过程
环境
Linux
Python 3.11.3 + Scapy
原理
traceroute 主要通过IP协议和ICMP协议两者共同完成(负载上也有TCP和UDP两种实现,这里只讲UDP实现)
IP协议中的TTL字段每经一个路由器都会-1, 若-1后为0,路由器将其丢弃,并将向源ip地址(发起方)回复一个ICMP的超时报文,从超时数据报的源IP地址中, 发起方便可获取该路由器的IP地址、
利用以上原理,traceroute可以在第一次发送TTL=1的UDP(or TCP?)报文,收到超时的回复时再发送TTL=2的报文,如此反复,直到发送到目的IP地址,或达到设定的最高hop数(Linux 中的 traceroute 默认为30 hops),便可得出数据包途经的IP地址。
需要注意的是,现在的许多路由器开启了防火墙等功能,被配置为了不返回ICMP报文,因此traceroute命令无法获得该路由器的IP地址,在原命令中显示为*。traceroute不会因为遇到该种情况停止,而是继续增加TTL,发出数据包,直到遇到以上所述的情况而停止。
那么,如何根据ICMP来得出路由器返回的不同情况呢?
ICMP 提供了type字段以及细分的code字段以区分不同的类型,其中有两个在traceroute中尤其重要:
| Type | Code | description |
|---|---|---|
| 11 | 0 | TTL expired in transit |
| 3 | 3 | Destination port unreachable |
Destination port unreachable(目的端口不可达): traceroute 的目的端口设为>30000(Linux 默认值为33434), 大多数的服务器处理该数据报时会将其视为端口不可达,因此返回特定报文。
为什么目的端口设定为大于30000
UDP的实现中保证了0~65535的端口号可用,在RFC文档中并没有限制端口使用。
man文档中的解释为:探测包需要使用 udp datagrams with so-called "unlikely" destination ports,于是就选择了默认值33434,也许设计者认为33434大伙儿都不会用吧,文档中也说明不保证33434如果有应用用了,traceroute的行为如何。
至于端口设置为大于30000的说法,也许只是网上的人云亦云?
TTL expired in transit(TTL 超时):TTL为0时路由器返回的ICMP报文,用于获取该路由器的源IP地址。
综合来看, traceroute的设计足够巧妙,利用了两个协议的组合使用来达成功能。
也足够严谨,说明了自己选择目的端口33434会导致未定义行为
Code
import sys
import socket
import time
from scapy.all import *
def my_trace_one(dest_ip:str, dest_port:str, ttl:int):
begin_time = time.time()
# verbose 会输出多余信息,timeout为设定单次请求超时时间1s。
# IP段设置目的IP, ttl生存周期, UDP设置源port(这感觉无所谓的), 目的端口设为不可达(>30000)
reply = sr1(IP(dst=dest_ip, ttl=ttl)/UDP(sport=6600, dport=dest_port), timeout=1, verbose=False)
end_time = time.time()
period=end_time-begin_time
try:
if reply.getlayer(ICMP).type==11 and reply.getlayer(ICMP).code==0:
now_ip = reply.getlayer(IP).src
return "TTL expired in transit", now_ip, period
elif reply.getlayer(ICMP).type == 3 and reply.getlayer(ICMP).code == 3:
now_ip = reply.getlayer(IP).src
return "Destination port unreachable", now_ip, period
except Exception as e:
return None
def my_traceroute(domain:str,ip:str, hops:int=30):
print("Destiny : "+f"({domain}) "+ip)
hop = 0
flag = True
# traceroute default port: 33434
dest_port=33434
while flag and hop<hops:
hop += 1
dest_port +=1
message = str(hop)+" "
result = my_trace_one(dest_ip=ip, dest_port=dest_port, ttl=hop)
if result is None:
message +="\t*"
elif result[0]=="TTL expired in transit":
message += f"\t{result[1]}\t{result[2]*1000}ms"
elif result[0]=="Destination port unreachable":
message += f"\t{result[1]}\t{result[2]*1000}ms\nOver!"
flag=False
print(message)
if __name__ == "__main__":
domain = sys.argv[1]
if len(sys.argv)>2:
hops = int(sys.argv[2])
else:
hops=30
ip = socket.gethostbyname(domain)
my_traceroute(domain, ip, hops)Picture
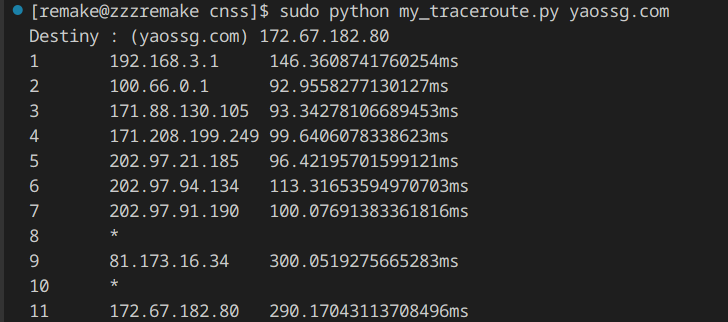
演示:
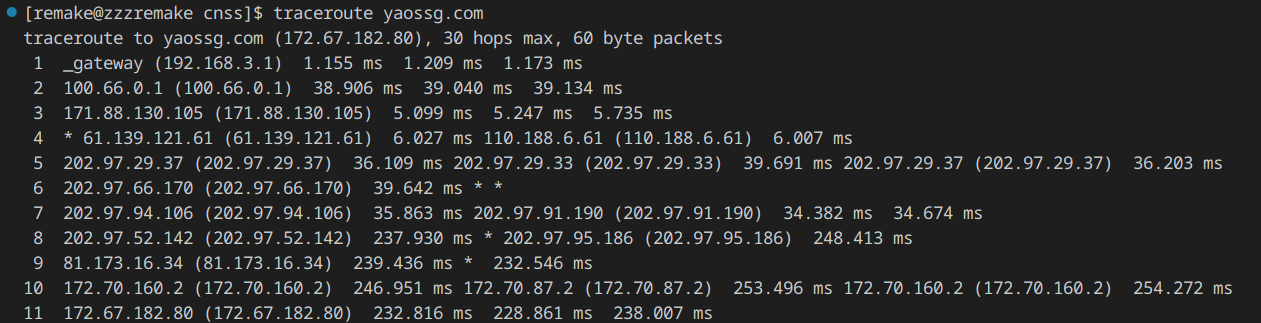
看看Linux的